Perception and Visual Cognition
Department of Psychology
Approaches to Visual Perception
Ecological - e.g. Gibson (1950)
Constructionist - e.g. Hochberg (1970)
Computational - e.g. Marr (1980)
Ecological View
Founded by Gibson (1904-1979)
Primary goal of perception is to support actions and identify important events, based on the information available in spatial and temporal changes in the optic array.
Ecological View
Direct theory of perception without mediation by complex cognitive processes. Texture alone can reveal surface shape and slant:
Ecological View
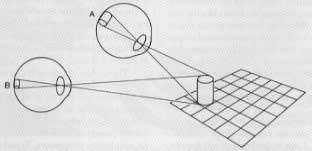
Depth can be perceived directly from the amount of texture an object occupies, without complicated computations based on retinal size and prior knowledge:
Ecological View
Objects have affordances that may be perceived directly e.g. an apple is ŇeatableÓ, a chair affords ŇsittingÓ, a picture of an apple affords only inspection, never grasping or eating.
Affordance is identified from resonance, not from matching with memory traces.
Traditional experiments and visual illusions tell us nothing about Perception, only how observers cope with artificially impoverished inputs.
Constructionist View
What is important is not how perceptions support action, but how perceptions support understanding
19th and early 20th century Structuralists proposed that perceptions are the sum of many elementary sensations
Gestaltists and Constructionists instead argue that representations of reality are assembled from fragments of sensory information - the whole percept is often greater than the sum of the parts
Muller-Lyer Illusion
from: Gregory, R. L. (1973) Eye and brain (2nd ed.). New York, McGraw-Hill
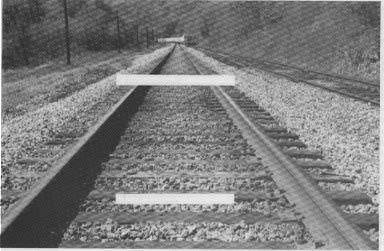
Ponzo or Railway Illusion
Impossible Objects

Constructionist View
Perceptions are influenced by experience, knowledge and expectations, this distinguishes them from Gestaltists
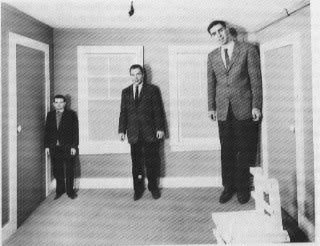
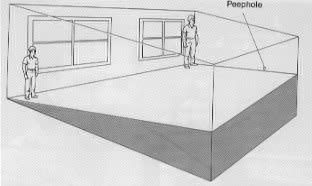
Ames Room
Computational View
Describe computations within the visual system that convert sensory stimulation into representations of the world.
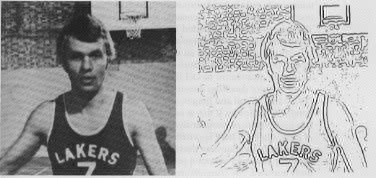
The main job of vision is the representation of shape by encoding edges, corners, texture etc.
Computational Model
Edges are located at zero crossings in the 2nd spatial derivative of an image:
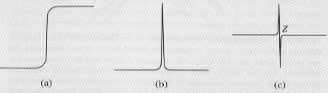
Zero crossings in the 2nd spatial derivative of an image:
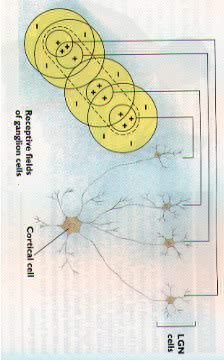
Physiological substrates for encoding edges
Comparison of predicted responses of on- and off-centre X cells with electrophysiological recordings
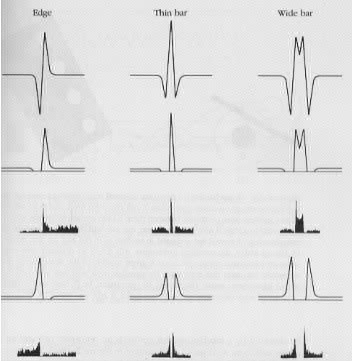
from: Marr, D. (1982) Vision. New York, Freeman